
Ostatnimi czasy, gdy widuję się z innymi entuzjastami elektrycznych kółek,często spotykam się z pytaniami co do zasady działania silnika. Raczej wszyscy zdają sobie sprawę, że silniki używane w monocyklach to bezszczotkowe silniki prądu stałego, w skrócie BLDC. Jednak często na tym wiedza się kończy. Z racji że jestem elektronikiem i zdarzyło mi się kiedyś uczestniczyć przy projekcie sterowania tego typu napędem, postaram się przybliżyć nieco tę wiedzę. Chcę skupić się na ogólnych zasadach, nie zagłębiając się zbytnio w teorię i szczegóły, które nie każdego mogą interesować lub po prostu być trudne do przyswojenia przez osoby nie zajmujące się elektroniką czy fizyką.
Klasyczny silnik elektryczny
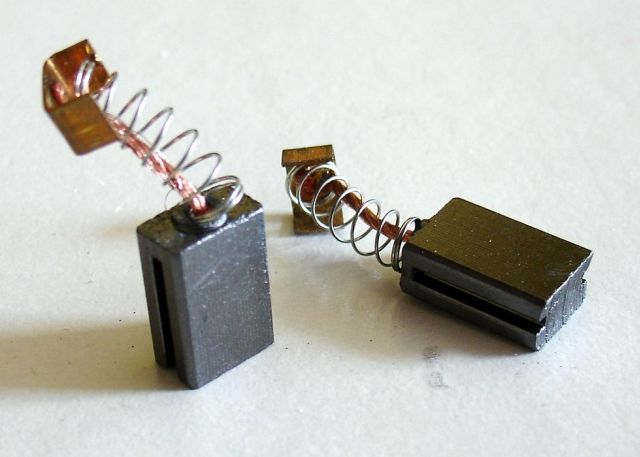
Silnik elektryczny został wynaleziony przez angielskiego fizyka i chemika - Michaela Faradaya - w 1831 roku. Najczęściej spotykanymi silnikami elektrycznymi są komutatorowe silniki szczotkowe. Szczotki to specjalny rodzaj kontaktu elektrycznego pomiędzy dwiema, lub więcej, ruchomymi częściami. Posiadają one sprężyny dla lepszego docisku oraz ścierne elementy grafitowe.

W silniku elektrycznym szczotki zapewniają stały dopływ prądu do komutatora, poprzez który prąd trafia do uzwojeń wirnika. Dzięki przepływowi prądu wytwarzane jest pole elektromagnetyczne powodujące zjawisko odpychania i przyciągania względem uzwojeń cewek zamontowanych na stojanie wprawiając wirnik w ruch.
Największą wadą silników szczotkowych są właśnie szczotki. Te elementy mają stały kontakt mechaniczny z obracającym się komutatorem, przez co ścierają się i po jakimś czasie wymagają wymiany.
Silnik elektryczny bezszczotkowy BLDC
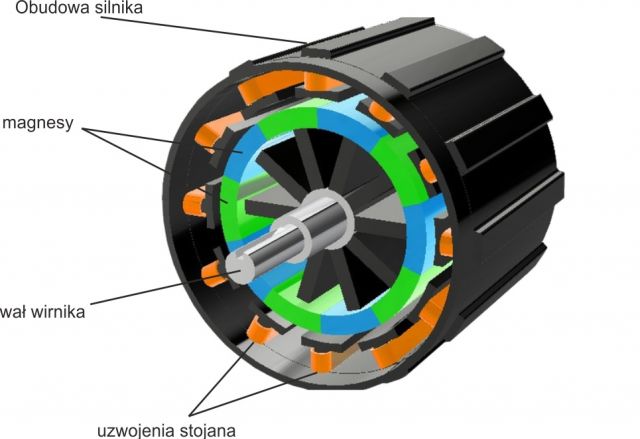
Silnik nieposiadający szczotek, zasilany prądem stałym, to właśnie silnik BLDC (Brushless DC). Zamiast wirujących cewek, w silniku BLDC wirują magnesy, natomiast cewki (uzwojenia) są umieszczone na stojanie. Skoro cewki są nieruchome, to bez problemu można do nich doprowadzić przewody. Część wirująca nie musi posiadać żadnych cewek, a jedynie magnesy trwałe, które same w sobie podlegają działaniu pola elektromagnetycznego.
Przy takim rozwiązaniu pozbywamy się szczotek, silnik jest dużo cichszy oraz zdecydowanie mniej awaryjny. Jedynymi elementami podatnymi na zużycie są łożyska, ale te występują w każdym silniku i ich żywotność musi się kiedyś skończyć.
Ponadto, silnik bezszczotkowy umożliwia uzyskiwanie wyższych sprawności energetycznych, a co najważniejsze, można w nim kontrolować prędkość obrotową prawie niezależnie od momentu silnika. Równie ważną zaletą tego typu silników jest ich mniejszy rozmiar w stosunku do porównywalnych mocą klasycznych silników elektrycznych ze szczotkami.
Skoro silniki bezszczotkowe mają tyle zalet to dlaczego nadal stosuje się te szczotkowe?
Zwykłe silniki szczotkowe mogą pracować przy zasilaniu bezpośrednio z sieci elektrycznej. Nie ma potrzeby stosowania żadnego sterowania, aby pracowały one z nominalnymi obrotami. Wystarczy podłączyć taki silnik do prądu i już się kręci.
Inaczej jest w przypadku silników BLDC, gdzie elektroniczny sterownik jest koniecznością. Bez niego silnik w ogóle nie będzie pracował. Generuje to pewną trudność i oczywisty koszt. Kolejnym elementem wpływającym na cenę silnika bezszczotkowego jest duża liczba drogich ferro-magnesów (ziemskich minerałów).
Często nawet klasyczny silnik ze szczotkami, w zestawie z falownikiem umożliwiającym płynną regulację obrotów, jest tańszym rozwiązaniem od podobnego parametrami silnika BLDC, wraz z niezbędnym w tym wypadku sterowaniem.
Silnik w monocyklu elektrycznym
W elektrycznych monocyklach silnik wbudowany jest w felgę koła. Na feldze od wewnętrznej strony ułożone (przyklejone) są silne magnesy trwałe (ferro-magnesy) i to one kręcą się wraz z felgą. Uzwojenia cewek są natomiast umieszczone bliżej środka koła na nieruchomej osi silnika. Cewki połączone są ze sobą w taki sposób aby stanowiły tylko kilka biegunów. Łączy się np. co trzecią cewkę lub co szóstą.
Firmy takie jak KingSong i Gotway stosują 3-biegunowe sterowanie, natomiast IPS, Ninebot czy InMotion 6-biegunowe. Im mniej biegunów, tym mniej przewodów i mniejszy koszt budowy silnika oraz prostszy i tańszy układ elektroniczny do jego sterowania. Natomiast samo sterowanie silnikiem od strony algorytmu staje się trudniejsze. Aby zachować płynność i precyzję obracania się koła, zwłaszcza przy niskich prędkościach, należy stosować znacznie bardziej wyrafinowane techniki sterowania, zarówno od strony doboru odpowiednio szybkich procesorów sterujących jak i odpowiednio zbudowanego oprogramowania. Jest to najtrudniejsza część całej zabawy.

W kolejnej części opowiem jak przebiega proces sterowania silnikami naszych kółek.
Źródła zdjęć:
http://forbot.pl/blog/artykuly/mechanika/silniki-elektryczne-szczotkowe-bezszczotkowe-krokowe-id2802
https://pl.wikipedia.org/wiki/Szczotka_(elektrotechnika)
https://grabcad.com/library/bldc-motor-2
https://reviews.ru/article.html?id=4160





